In this post, we are going to see how to build our own music recommender, using the Logistic Metric Embedding (LME) model developed by Joachims (of SVMLight fame). The core idea of this recommender is that people listen to songs in a specific sequence, and that certain songs sound better when they follow other songs.
Here we review math of the LME; But first, a little history
Introduction: Some History of Sequence Prediction
I first began working in sequence prediction in about 2001, where I developed the Effective Operator approach to Personalized Recommenders. This was a recommender system that used a kind of Bayesian / Regularized Linear Regression. Some years later, working with eBay, we researched the effectiveness of search relevance (a kind of sequential recommendation) using techniques including Joachims’ earlier work on Structural SVMs. Recent work has focussed on built upon the Structural SVMs for Ranking, leading to a new, simpler approach, Metric Learning to Rank. Metric Embedding is, in general, a good thing to know about, and you can learn about it more generally from the University of Chicago course: CMCS 39600: Theory of Metric Embeddings. Joachims has subsequently also considered metric learning, and here, we examine some his recent research in metric learning for sequence prediction. Specifically, we look in detail at the Logistic Metric Embedding (LME) model for predicting music playlists.
Sequence Prediction with Local Metric Embeddings
We would like to recommend playlist of songs. More generally, we seek to estimate the probability of observing a new, directed sequence 

Developed by Joachims (and following his notation), we seek to predict a (directed) sequence of states 




We embed the sequence into the Latent space, or the d-fold Tensor space (which is isomorphic to a 


The inference problem is to find 
Because we have a Markov Model, we will see that all we need is to write down the local log-Likelihood, defined through the conditional transition probabilities 
Also, we note that assuming a Markov Model is actually restrictive (Recall our post on Brownian motion and memory effects in chemical physics) . First, it assumes that to predict the next song, the only songs that matter are the ones we listened to before this song. Additionally, Markov Models can ignore long-range interdependencies. A NMF based recommender does not assume this, and they include long-range effects.
Recent work (2013) shows how to parallelize the method on distributed memory architectures, although we will do all of our work on a shared memory architecture. they even provide sample code!
Visualizing the Embedding
For example, a typical embedding is visualized as:
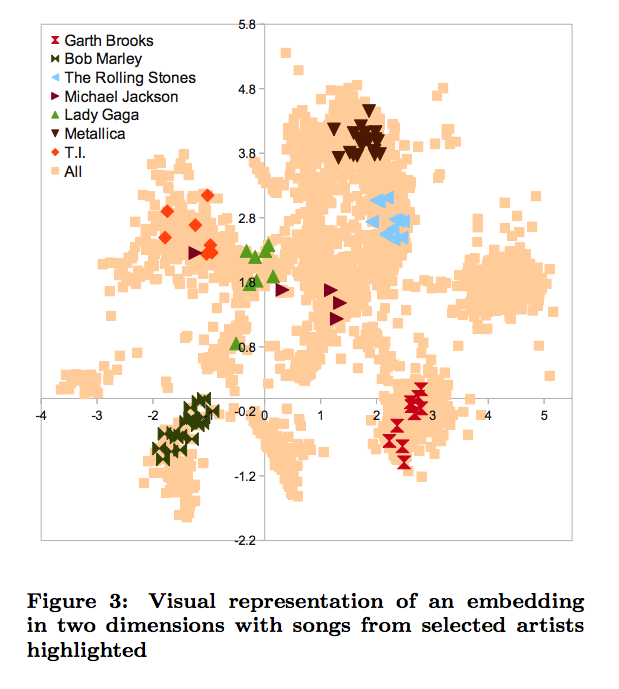
The Online LME Demo provides an interactive view of the embedding. It also includes simple modifications for adding popularity, user bias, and even semantic tags to the model (not discussed here)
Single and Dual Point Logistic Metric Embeddings
Joachims introduces 2 different models, called the Single Point and Dual Point models. We should only care about the Dual Point model, although, curiously, in the published paper (2012), the Dual Point model does not work better than the Single Point model. So, for now, we describe both. Also, the code contains both models.
By a Metric Embedding, we mean that the conditional probability is 


What is the Embedding?
We associate each state 


Notice Joachims writes 


In a model for , say, playlists, each vector it is , initially, just a point 



What is 
In the Single Point model, 


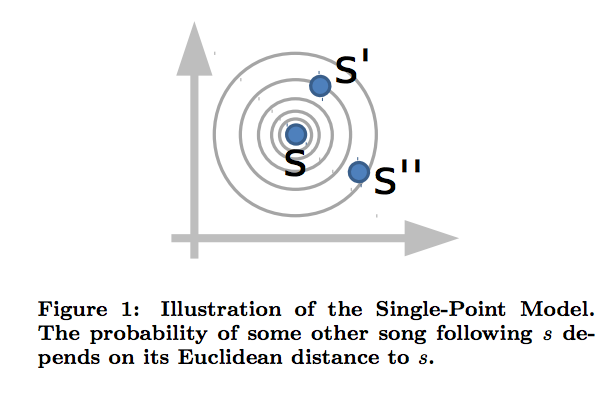

This is just a standard Vector Space model.
In the Dual Point model, however, we associate 2 points (vectors) 





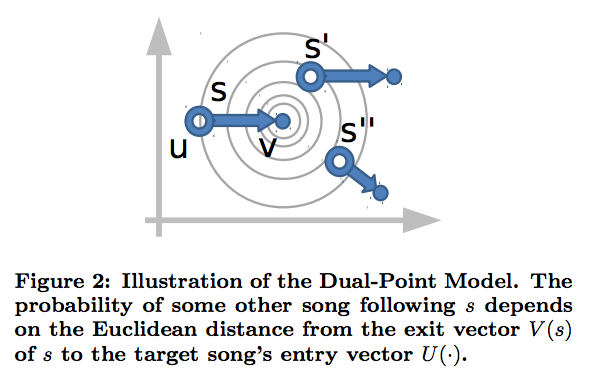
The distance between 2 states the asymmetric divergence

This is like a Vector Field Model, where each state is mapped to a directed vector

(In mathematical physics, the embedding is a called a Vector Field or, more generally, a Fiber Bundle ).
The Latent metric is the Euclidean distance between the end point of 

We can also construct sequence-independent (

Model Inference
We want to find

where 

This is just the normalization of the conditional probability (above). Note that the sum is over all possible states 
Actually, the final model used is somewhat more complicated because it includes other features to adjust for popularity, user bias, diversity, etc.
Final LME Model

The optimal solution is found by maximizing the log-Likelihood 
in this related post, I explain the partition function and where it comes from.
For the Single Point Model, the objective function is the log-Likelihood plus a standard 2-norm regularizer

For the Dual Point Model, the objective function includes 2 kinds of regularizers

The first regularizer is

and ensures that the entry and exit vectors don’t get too large. It is similar to the kind seen in traditional matrix factorization techniques.
The second regularizer ensures the small length sequences, and is similar in spirit to the kind of path regularizers seen in Minimum Path Basis Pursuit methods (where, ideally, we would seek use an L1-norm for this). This part is critical because it allows to decompose what looks like a large, messy, non-convex, global optimization problem into a convex sum of local, albeit non-convex , optimization problems:
A Local Manifold Optimization Problem
Here is the real trick of the method
By including the dual point, local path regularizers 
We re-write the objective function 

where
is the collection of states close to
(i.e all nearest neighbors, observed bigams, etc.),
is the number of transitions from
, and is precomputed from the training data, and
is the dual point, local log-likelihood term for the transition

is the global regularizer, but which is trivial to evaluate locally (using SGD)
While the optimization problem is clearly non-convex, this decomposition allows us to ‘glue together’ a convex combination of locally non-convex but hopefully tractable optimizations, leading to what I call a manifold optimization problem. ( Indeed, from the point of view of mathematical physics, the dual point embedding model has the flavor of a non-trivial fiber bundle, and the path constraints act to minimize the curvature between the bundles; in other words, a gauge field theory. ) Usually I don’t trust non-convex methods. Still, it is claimed good solutions can be found with 100-200 iterations using standard SGD. We shall see…
SGD Update Equations
Joachims suggests solving the SGD by iterating through all states (songs) 

![U(s_p)\leftarrow U(s_p)+\dfrac{\tau}{N}\left[\underset{b\in C_p}{\sum}T_{pb}\dfrac{\partial l(s_p,s_b)}{\partial U(s_p)}+\dfrac{\partial\Omega(U,V)}{\partial U(s_p)}\right]](https://s0.wp.com/latex.php?latex=U%28s_p%29%5Cleftarrow+U%28s_p%29%2B%5Cdfrac%7B%5Ctau%7D%7BN%7D%5Cleft%5B%5Cunderset%7Bb%5Cin+C_p%7D%7B%5Csum%7DT_%7Bpb%7D%5Cdfrac%7B%5Cpartial+l%28s_p%2Cs_b%29%7D%7B%5Cpartial+U%28s_p%29%7D%2B%5Cdfrac%7B%5Cpartial%5COmega%28U%2CV%29%7D%7B%5Cpartial+U%28s_p%29%7D%5Cright%5D+&bg=%23ffffff&fg=%23000000&s=0&c=20201002)
and for each 
![V(s_q)\leftarrow V(s_q)+\dfrac{\tau}{N}\left[\underset{b\in C_p}{\sum}T_{pb}\dfrac{\partial l(s_p,s_b)}{\partial V(s_q)}+\dfrac{\partial\Omega(U,V)}{\partial V(s_p)}\right]](https://s0.wp.com/latex.php?latex=V%28s_q%29%5Cleftarrow+V%28s_q%29%2B%5Cdfrac%7B%5Ctau%7D%7BN%7D%5Cleft%5B%5Cunderset%7Bb%5Cin+C_p%7D%7B%5Csum%7DT_%7Bpb%7D%5Cdfrac%7B%5Cpartial+l%28s_p%2Cs_b%29%7D%7B%5Cpartial+V%28s_q%29%7D%2B%5Cdfrac%7B%5Cpartial%5COmega%28U%2CV%29%7D%7B%5Cpartial+V%28s_p%29%7D%5Cright%5D+&bg=%23ffffff&fg=%23000000&s=0&c=20201002)
where
is the SGD learning rate, and
is the number of transitions sampled
The partials over the regularizers are simple


The partial over


while the partial over 

Notice 

Possible Extensions
In a simple Netlfix-style item recommender, we would simply apply some form of matrix factorization (i.e NMF) to
Next Steps
Now that we have a basic review of the model, it would be fun to make some personalized playlists. This can be done using the online LME Software. Have fun exploring!
References
See Joachims Website on Playlist Prediction and the references list

> In our next post, we will look in detail at the LME Software and build some actuals playlists.
Looks like that won’t happen.
Actually LME code is a mess. The fact that you can compile it with simple make is nice, but code is very hard to read.
LikeLike
Frequently academic code needs to be cleaned up. Turns out the guy I was working this with decided to switch gears and do something else.
LikeLike
so are there any actual plugins that use this ? actual usable code ?
would love to integrate this
LikeLike
Joachims released code. It’s not pretty.
LikeLike